E-shop
- PŘÍVĚSY VEZEKO
-
PŘÍVĚSNÉ VOZÍKY, PŘÍVĚSY
»
- KATALOGY VEZEKO
- CENÍK PŘÍVĚSŮ
- Přívěsy ve SLEVĚ - AKCE DC
- PŘÍVĚSY SKLADEM
-
PŘÍVĚSY DO 3500 kg
»
- Univerzální »
- Přívěsy na přepravu motokár »
- Sklopné přívěsy »
- S naklápěcí ložnou plochou »
- Př. se spoušt. ložnou plochou »
- Skříňové přívěsy »
- Autopřepravníky »
- Kontejnerové přívěsy »
- Přívěs na přepr. stav. strojů »
- Přívěsy na přepravu motocyklů »
- Přívěs na přepravu lodí »
- Pro přepravu zvířat a koní »
- Pro přepravů psů »
- STAVEBNÍ MOBILNÍ BUŇKY
- SPECIÁLNÍ PŘÍVÉSY »
- Nákladní přívěsy 3500-10000kg »
- Automobilové nástavby »
- Návěsy
- Legislativa
- REALIZACE - příklady realizace
-
NÁHR. DÍLY PŘÍVĚSNÉ VOZÍKY
»
- BLATNÍKY , ZÁSTĚRKY »
- BOČNICE A SOUČÁSTI »
- BOČNICOVÉ UZÁVĚRY A PANTY »
- BRZDY »
- DISKY KOL
- ELEKTROINSTALACE »
- HYDRAULICKÉ KOMPONETY sklápění »
- KOLA kompletní - REZERVY »
- KONSTRUKČNÍ PRVKY »
- KOTVICÍ OKA
- KULOVÉ SPOJKY , KLOUBY
- LOŽISKA KOL
- NÁJEZDY
- NÁJEZDOVÉ BRZDY »
- NÁPRAVY »
- NAVIJÁKY a jejich příslušenství »
- ODSTAVNÉ PATKY
- OPĚRNÁ KOLEČKA A NOHY »
- OSVĚTLENÍ - světla , odrazky »
- PODLOŽKY POD SPZ
- POPRUHY - upevnění nákladu
- PLACHTY ,SÍTĚ - PŘÍSLUŠENSTVÍ »
- PLYNOVÉ VZPĚRY
- PNEUMATIKY
- SAMOLEPKY - rychlostní
- TLUMIČE
- ZAKLÁDACÍ KLÍNY
- ZÁMKY A ZABEZPEČENÍ
- OSTATNÍ PŘÍSLUŠENSTVÍ »
- PŮJČOVNA PŘÍVĚSŮ
- NÁHRADNÍ DÍLY SKÚTR , MOTO
-
ND SKÚTR, MOTO, ATV
»
-
MOTO - SKÚTR - náhradní díly
»
- díly 140 ccm CROSS, DIRTBIKE
- díly motor 125ccm P156FMI ZIPP
- díly 160 ccm CROSS, DIRTBIKE
- díly motor 125 ccm typ 154FMI
- díly MINI bike,cross ,ATV »
- Baterie akumulátory
- Blatníky
- Brzdová soustava »
- CDI - jednotky zapalování
- čerpadla oleje
- držáky motoru
- Duše pneumatik »
- Elektroinstalace »
- Fajfky - koncovky kabelů zapal
- Filtry a příslušenství »
- Gripy - rukojetě řídítek
- Gufera - simerinky »
- Přerušovače blinkrů
- Hadice , hadičky
- Hlavy a kryty a víka hlav »
- Chlazení motoru »
- Kabely zapalování
- Karburátory
- Karburátor - opravné sady
- Karburátory - příslušenství »
- Kartery motorů
- Klaksony-houkačky na motocykl
- Klikové hřídele motoru
- Kola - ráfky »
- Kontrolky - přístrojová deska
- Kryty motorů
- Kryty rukou
- Kryty řetězového kolečka
- Kryty variátoru -víka
- Kryty ventilátorů , zapalování
- Kyvné vidlice , uložení »
- Lanka - ovládání , náhony »
- Lékarničky
- Ložiska »
- Membrány- klapky sání
- Měrky oleje
- Spojovací materiál »
- Motory
- Nabíječky baterií
- Nádrže a příslušenství »
- Napínáky řetězů
- NÁŘADÍ A PŘÍPRAVKY a přísluš. »
- Odpory světel skútr
- Oleje , maziva »
- Osvětlení - světla, blikače »
- Osy kol
- Páčky , držáky »
- Palivové kohouty a ventily
- Pístní čepy
- Pístní kroužky
- Písty motoru
- Plachty krycí - moto , skútr
- Plasty - karoserie »
- Pojistky
- PLEXI , SKLA MOTO SKÚTR
- Podložka pod SPZ
- Pneumatiky »
- Přepínače - světel, blinkrů
- Převodovka »
- Převody náhonu tachometru
- Příruby karburátoru
- Příslušenství »
- Přístroje - tachometry
- Regulátory napětí - dobíjení
- Relé , snímače »
- Rozety - zadní
- Rozpěrky - distanční pouzdra
- Rozvody motorů
- Rozvodové řetězy a příslušen.
- Řemeny variátoru
- Řazení - převodovka »
- Řetězy a spojky řetězů
- Řetězová kolečka - přední »
- Řetězy startéru
- Řízení »
- Sedla moto, skútr »
- Silenbloky a uložení
- Spínače , snímače »
- Spínací skříňky- sady zámků
- Spojka
- Startování - startéry a přísl. »
- Startovací páky
- Startovací relé
- Startovací segmenty
- Stojany a příslušenství
- Dorazová guma stojanu
- Stupačky »
- Sytiče karburátorů
- Tachometry, přístroje
- Těsnění »
- Tlumiče »
- Uzávěr palivové nádrže
- Vačkové hřídele
- válce motoru
- Válečky variátoru
- Variátor a odstředivá spojka »
- Ventilky
- Ventily hlavy motoru a přísl.
- Větrné štíty- PLEXI
- Vodítka řetězů
- Vstřikování »
- Výfuky »
- Vyhřívané rukojetě
- Výplety kol , dráty
- Zámky a zabezpečení
- Zapalovací cívky
- Zapalovací svíčky
- Zapalování - rotory »
- Zapalování - statory
- Zástěrky
- Zavazadlové boxy - Kufry
- Závaží řídítek - koncovky
- Zrcátka zpětná
- Žárovky
- ROZBALENÉ,Nekompletní
- díly JAWA »
- díly SIMSON
-
ČTYŘKOLKY - náhradní díly
»
- blinkry
- CF MOTO »
- Brzdový systém »
- CDI jednotky
- disky kol a příslušenství
- duše pneumatik
- fajfky svíček
- filtry »
- filtry paliva
- gripy řidítek
- Hadičky
- Hlavy motoru
- chlazení motoru »
- kabely zapalování
- karburátory
- karburátor - opravná sada
- kardany, kříže
- Klikové hřídele motoru
- kryty rukou
- kyvná vidlice zadní
- lanka ovládání,náhony »
- Lékarničky
- LINHAI - ND »
- Ložiska kol
- měrky oleje
- montážní a spojovací materiál (šrouby,ma
- Motory
- nádrže a příslušenství
- Napínáky řetězu
- NAVIJÁKY ATV a jejich přísluše »
- Oleje a maziva
- Osvětlení - světla, blikače »
- páčky brzdové a spojkové
- Páčky ovládání plynu
- pneumatiky
- podvozek a řízení »
- pojistky
- Podložky pod SPZ
- přepínače
- přerušovače blinkrů
- Převodovka »
- příruby a gumy karburátoru
- příruby karburátoru
- příslušenství karburátorů
- regulátory dobíjení
- Relé ovládací
- relé starterů
- rozety zadní
- rozvodové řetězy
- řemeny variátoru
- řetězová kolečka »
- řetězy
- řetězy startéru
- silenbloky a uložení
- simeringy (gufera) »
- snímače rychlosti
- Spínací skříňky- sady zámků
- spínače brzdových světel
- spojka
- startery a příslušenství
- Tachometry,přístroje
- sytiče karburátorů
- tažné zařízení ATV
- těsnění »
- Tlumiče
- Válce motoru
- válečky variátoru
- variátor a odstředivá spojka
- ventily hlavy motoru
- víčka filtrů oleje
- víčka nádrží
- víčka nádrží oleje
- vyhřívané rukojetě
- zapalovací cívky
- zapalovací svíčky
- Zapalování - rotory
- zapalování - statory
- závaží řídítek (koncovky)
- zrcátka
- Žárovky
- BASHAN
- Náhradní díly GO KART »
-
MOTO - SKÚTR - náhradní díly
»
- ND KOLOBĚŽKY »
- PŘILBY, BRÝLE , RUKAVICE přísl »
- VÝPRODEJ
- MOTOCYKLY,SKÚTRY, ATV
- OSTATNÍ
- BAZAR - ojetá AUTO / MOTO
- Náhradní díly - automobily »
- nahradni díly VSE
Zde můžete provést on-line rezervaci do našeho autoservisu

![]()
Úvod » ND KOLOBĚŽKY » Řídící jednotka regulátor 48V 20A TF100-EABS koloběžky KUGOO M4
Řídící jednotka regulátor 48V 20A TF100-EABS koloběžky KUGOO M4
Vaše hodnocení:
Děkujeme za Vaše hodnocení!
Děkujeme za Vaše hodnocení!
0x

skladem ANO
Tweet

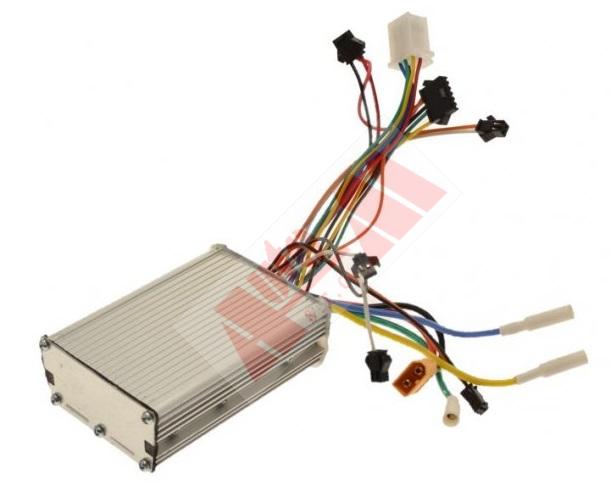


Řídící jednotka regulátor 48V 20A TF100-EABS koloběžky KUGOO M4
napětí : DC 36/48V
proud: 20A
Inteligentní bezkomutátorový ovladač motoru pro koloběžky KUGOO M4 M4 PRO 2
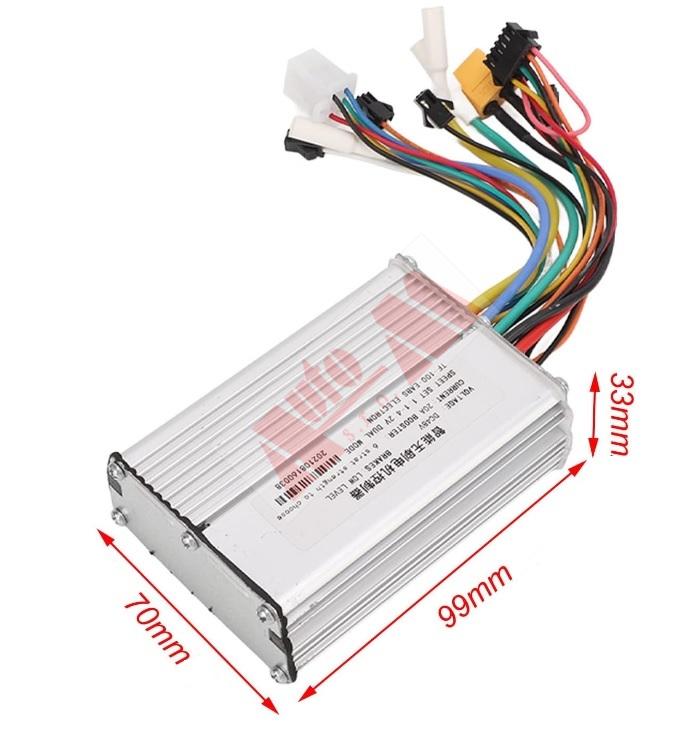
rozměry bez konektoru
šířka 69 mm
délka 99 mm
výška 32 mm
porovnejte s obrázkem
použito např:
-
Kugoo M4
-
Kugoo M4 Pro
-
Techlife 7X
-
Zero X10
